Followers
This provides a simple way to set a Turnout to "follow" the state of an input sensor. You
might want this so you can connect a fascia toggle switch to a Sensor, and have it drive a
switch motor that's connected as a JMRI Turnout, for example.
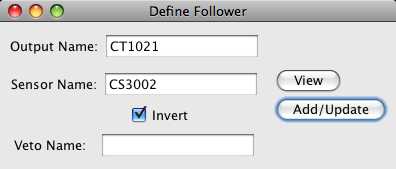
Fields and buttons:
- Output Name
- Enter the system name or user name of the Turnout the follower will control
- Sensor Name
- Enter the system name or user name of the Sensor the follower will watch
- Invert
- Normally, the turnout is set THROWN when the Sensor is ACTIVE, and set CLOSED when the
sensor is INACTIVE. Checking the "Invert" box causes the turnout to be set THROWN when the
sensor is INACTIVE, and set CLOSED when the Sensor is ACTIVE.
- Veto Name
- If a sensor is added here, the follower will not control the turnout when the sensor is
ACTIVE. This can be used e.g. to lock a turnout from local control.
- View
- Enter an output turnout name and click this button to see any existing follower
configuration.
- Add/Update
- File out fields as desired and press Add/Update to create a new follower or modify an
existing one.